
La structure et la conception d’un véhicule purement électrique sont différentes de celles d’un véhicule traditionnel propulsé par un moteur à combustion interne. C’est aussi une ingénierie système complexe. Il doit intégrer la technologie des batteries de puissance, la technologie d’entraînement des moteurs, la technologie automobile et la théorie moderne du contrôle pour parvenir à un processus de contrôle optimal. Dans le plan de développement de la science et de la technologie des véhicules électriques, le pays continue d'adhérer au schéma de R&D « trois verticaux et trois horizontaux », et met en outre en avant la recherche sur les technologies clés communes des « trois horizontaux » conformément à la stratégie de transformation technologique de « entraînement électrique pur », c'est-à-dire la recherche sur le moteur d'entraînement et son système de contrôle, la batterie de puissance et son système de gestion, ainsi que le système de contrôle du groupe motopropulseur. Chaque grand fabricant formule sa propre stratégie de développement commercial en fonction de la stratégie de développement nationale.
L'auteur trie les technologies clés dans le processus de développement d'un groupe motopropulseur à nouvelle énergie, fournissant une base théorique et une référence pour la conception, les tests et la production du groupe motopropulseur. Le plan est divisé en trois chapitres pour analyser les technologies clés de la propulsion électrique dans le groupe motopropulseur des véhicules purement électriques. Aujourd'hui, nous présenterons d'abord le principe et la classification des technologies de propulsion électrique.
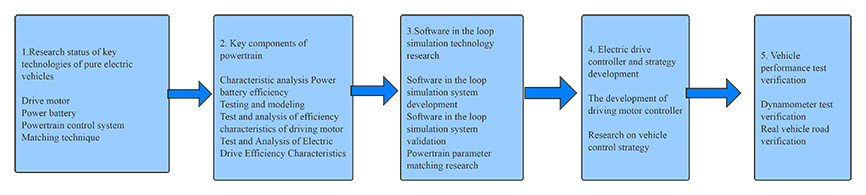
Figure 1 Liens clés dans le développement du groupe motopropulseur
À l’heure actuelle, les technologies clés de base du groupe motopropulseur des véhicules purement électriques comprennent les quatre catégories suivantes :
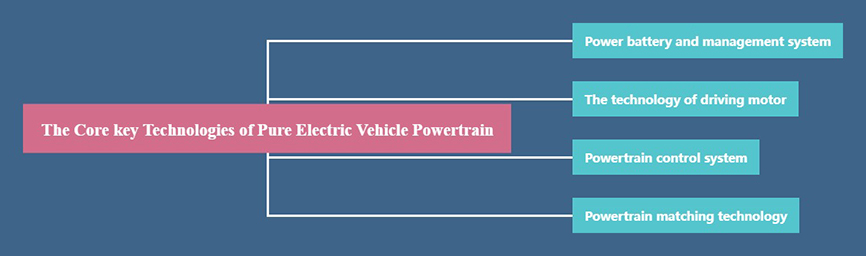
Figure 2 Les technologies clés de base du groupe motopropulseur
La définition du système moteur d’entraînement
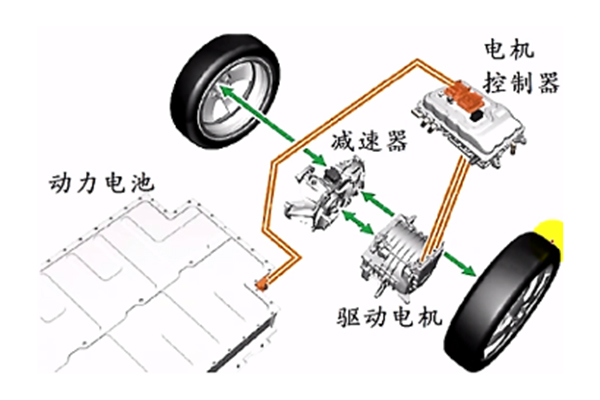
Selon l'état de la batterie du véhicule et les exigences de puissance du véhicule, il convertit l'énergie électrique produite par le dispositif de production d'énergie de stockage d'énergie embarqué en énergie mécanique, et l'énergie est transmise aux roues motrices via le dispositif de transmission et les pièces. de l'énergie mécanique du véhicule est convertie en énergie électrique et réinjectée dans le dispositif de stockage d'énergie lorsque le véhicule freine. Le système d'entraînement électrique comprend un moteur, un mécanisme de transmission, un contrôleur de moteur et d'autres composants. La conception des paramètres techniques du système d'entraînement à énergie électrique comprend principalement la puissance, le couple, la vitesse, la tension, le rapport de transmission de réduction, la capacité d'alimentation, la puissance de sortie, la tension, le courant, etc.

1) Contrôleur de moteur
Également appelé onduleur, il transforme le courant continu entrant par la batterie de puissance en courant alternatif. Composants de base :
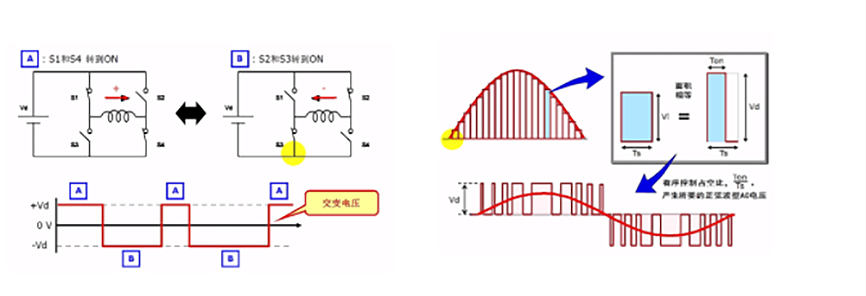
◎ IGBT : interrupteur électronique de puissance, principe : via le contrôleur, contrôlez le bras du pont IGBT pour fermer une certaine fréquence et le commutateur de séquence pour générer un courant alternatif triphasé. En contrôlant la fermeture de l'interrupteur électronique de puissance, la tension alternative peut être convertie. Ensuite, la tension alternative est générée en contrôlant le rapport cyclique.
◎ Capacité du film : fonction de filtrage ; capteur de courant : détection du courant de l'enroulement triphasé.
2) Circuit de contrôle et de conduite : carte de commande informatique, conduite de l'IGBT
Le rôle du contrôleur de moteur est de convertir le courant continu en courant alternatif, de recevoir chaque signal et de produire la puissance et le couple correspondants. Composants de base : interrupteur électronique de puissance, condensateur à film, capteur de courant, circuit de commande pour ouvrir différents interrupteurs, former des courants dans différentes directions et générer une tension alternative. On peut donc diviser le courant alternatif sinusoïdal en rectangles. L'aire des rectangles est convertie en une tension de même hauteur. L'axe des x réalise le contrôle de la longueur en contrôlant le rapport cyclique, et réalise enfin la conversion équivalente de la zone. De cette façon, l'alimentation CC peut être contrôlée pour fermer le bras du pont IGBT à une certaine fréquence et un commutateur de séquence via le contrôleur pour générer une alimentation CA triphasée.
À l'heure actuelle, les composants clés du circuit de commande dépendent des importations : condensateurs, tubes de commutation IGBT/MOSFET, DSP, puces électroniques et circuits intégrés, qui peuvent être produits indépendamment mais ont une faible capacité : circuits spéciaux, capteurs, connecteurs, qui peuvent être produits indépendamment : alimentations, diodes, inductances, circuits imprimés multicouches, fils isolés, radiateurs.
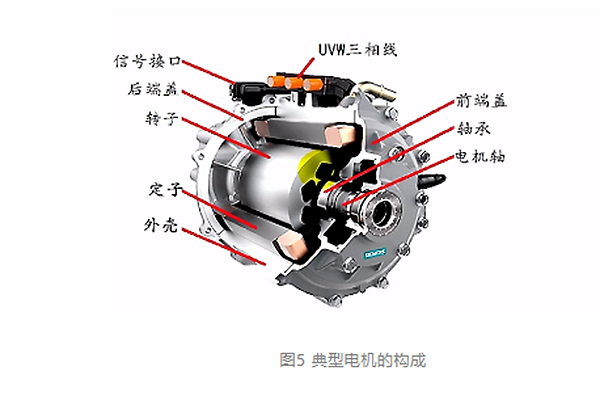
3) Moteur : convertir le courant alternatif triphasé en machines
◎ Structure : capots avant et arrière, coques, arbres et roulements
◎ Circuit magnétique : noyau de stator, noyau de rotor
◎ Circuit : enroulement du stator, conducteur du rotor
4) Dispositif de transmission
La boîte de vitesses ou réducteur transforme le couple de vitesse produit par le moteur en vitesse et en couple requis par l'ensemble du véhicule.
Type de moteur d'entraînement
Les moteurs d'entraînement sont répartis dans les quatre catégories suivantes. À l'heure actuelle, les moteurs à induction à courant alternatif et les moteurs synchrones à aimants permanents sont les types les plus courants de véhicules électriques à énergie nouvelle. Nous nous concentrons donc sur la technologie du moteur à induction AC et du moteur synchrone à aimant permanent.
| Moteur à courant continu | Moteur à induction à courant alternatif | Moteur synchrone à aimant permanent | Moteur à réluctance commuté | |
| Avantage | Coût inférieur, faibles exigences du système de contrôle | Faible coût, large couverture de puissance, technologie de contrôle développée, haute fiabilité | Densité de puissance élevée, rendement élevé, petite taille | Structure simple, faibles exigences du système de contrôle |
| Inconvénient | Exigences de maintenance élevées, faible vitesse, faible couple, durée de vie courte | Petite zone efficace, faible densité de puissance | Coût élevé Faible adaptabilité environnementale | Grande fluctuation de coupleBruit de travail élevé |
| Application | Petit ou mini véhicule électrique à basse vitesse | Véhicules commerciaux et voitures particulières électriques | Véhicules commerciaux et voitures particulières électriques | Véhicule à puissance mixte |
 1) Moteur asynchrone à induction AC
1) Moteur asynchrone à induction AC
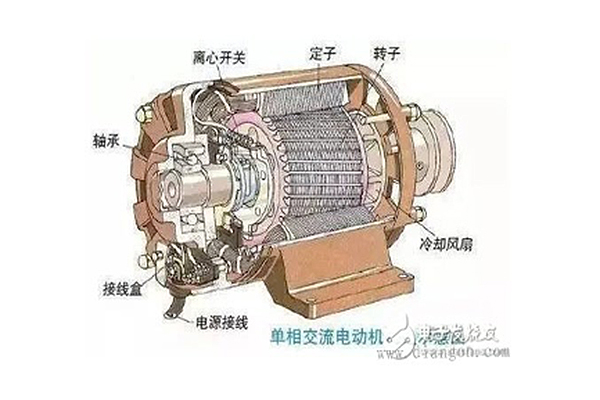
Le principe de fonctionnement d'un moteur asynchrone inductif à courant alternatif est que le bobinage traverse l'encoche du stator et le rotor : il est empilé de fines tôles d'acier à haute conductivité magnétique. L'électricité triphasée passera par le bobinage. Selon la loi d'induction électromagnétique de Faraday, un champ magnétique tournant sera généré, raison pour laquelle le rotor tourne. Les trois bobines du stator sont connectées à un intervalle de 120 degrés et le conducteur porteur de courant génère des champs magnétiques autour d'elles. Lorsque l'alimentation triphasée est appliquée à cet agencement spécial, les champs magnétiques changeront dans des directions différentes avec le changement du courant alternatif à un moment précis, générant un champ magnétique avec une intensité tournante uniforme. La vitesse de rotation du champ magnétique est appelée vitesse synchrone. Supposons qu'un conducteur fermé soit placé à l'intérieur, selon la loi de Faraday, car le champ magnétique est variable. La boucle détectera la force électromotrice, qui générera du courant dans la boucle. Cette situation est similaire à la boucle transportant du courant dans le champ magnétique, générant une force électromagnétique sur la boucle, et Huan Jiang commence à tourner. En utilisant quelque chose de similaire à une cage d'écureuil, un courant alternatif triphasé produira un champ magnétique tournant à travers le stator, et le courant sera induit dans la barre de la cage d'écureuil court-circuitée par l'anneau d'extrémité, de sorte que le rotor commence à tourner, ce qui est pourquoi le moteur est appelé moteur à induction. À l'aide de l'induction électromagnétique plutôt que d'être directement connectés au rotor pour induire de l'électricité, des flocons de noyau de fer isolants sont remplis dans le rotor, de sorte que le fer de petite taille assure une perte minimale par courants de Foucault.
2) Moteur synchrone à courant alternatif
Le rotor du moteur synchrone est différent de celui du moteur asynchrone. L'aimant permanent est installé sur le rotor, qui peut être divisé en type monté en surface et type intégré. Le rotor est en tôle d'acier au silicium et l'aimant permanent est intégré. Le stator est également connecté à un courant alternatif avec une différence de phase de 120, qui contrôle la taille et la phase du courant alternatif sinusoïdal, de sorte que le champ magnétique généré par le stator soit opposé à celui généré par le rotor, et le magnétique le champ tourne. De cette façon, le stator est attiré par un aimant et tourne avec le rotor. Cycle après cycle est généré par l’absorption du stator et du rotor.
Conclusion : La motorisation des véhicules électriques est fondamentalement devenue courante, mais elle n'est pas unique mais diversifiée. Chaque système d'entraînement motorisé possède son propre index complet. Chaque système est appliqué à la motorisation de véhicule électrique existante. La plupart d'entre eux sont des moteurs asynchrones et des moteurs synchrones à aimants permanents, tandis que certains tentent de commuter des moteurs à réluctance. Il convient de souligner que l'entraînement moteur intègre la technologie de l'électronique de puissance, la technologie microélectronique, la technologie numérique, la technologie de contrôle automatique, la science des matériaux et d'autres disciplines pour refléter l'application globale et les perspectives de développement de plusieurs disciplines. C’est un concurrent sérieux dans le domaine des moteurs de véhicules électriques. Afin d'occuper une place dans les futurs véhicules électriques, tous les types de moteurs doivent non seulement optimiser la structure du moteur, mais aussi explorer en permanence les aspects intelligents et numériques du système de contrôle.
Heure de publication : 30 janvier 2023


