
Comparativement aux moteurs à flux radial, les moteurs à flux axial présentent de nombreux avantages pour la conception des véhicules électriques. Par exemple, le déplacement du moteur de l'essieu vers l'intérieur des roues permet de modifier la conception de la chaîne cinématique.
1. Axe de puissance
Moteurs à flux axialCes moteurs suscitent un intérêt croissant. Utilisés depuis de nombreuses années dans des applications stationnaires telles que les ascenseurs et les machines agricoles, ils ont vu, au cours de la dernière décennie, l'intérêt de nombreux développeurs qui s'efforcent de les perfectionner et de les appliquer aux motos électriques, aux navettes aéroportuaires, aux camions de transport de marchandises, aux véhicules électriques et même aux avions.
Les moteurs à flux radial traditionnels utilisent des aimants permanents ou des moteurs à induction, qui ont connu des progrès considérables en matière d'optimisation du poids et du coût. Cependant, leur développement se heurte à de nombreuses difficultés. Le moteur à flux axial, un type de moteur totalement différent, pourrait constituer une alternative intéressante.
Contrairement aux moteurs radiaux, la surface magnétique effective des moteurs à aimants permanents à flux axial correspond à la surface du rotor, et non à son diamètre extérieur. Par conséquent, à volume égal, les moteurs à aimants permanents à flux axial peuvent généralement fournir un couple supérieur.
Moteurs à flux axialLes moteurs axiaux sont plus compacts ; comparés aux moteurs radiaux, leur longueur axiale est bien plus courte. Pour les moteurs à roues internes, il s’agit souvent d’un facteur crucial. La structure compacte des moteurs axiaux garantit une densité de puissance et une densité de couple supérieures à celles des moteurs radiaux similaires, ce qui permet de s’affranchir des vitesses de fonctionnement extrêmement élevées.
Le rendement des moteurs à flux axial est également très élevé, dépassant généralement 96 %. Ceci est dû au trajet du flux plus court et unidimensionnel, dont le rendement est comparable, voire supérieur, à celui des meilleurs moteurs à flux radial bidimensionnels du marché.
La longueur du moteur est réduite, généralement de 5 à 8 fois, et son poids est également diminué de 2 à 5 fois. Ces deux facteurs ont modifié les choix des concepteurs de plateformes pour véhicules électriques.
2. Technologie du flux axial
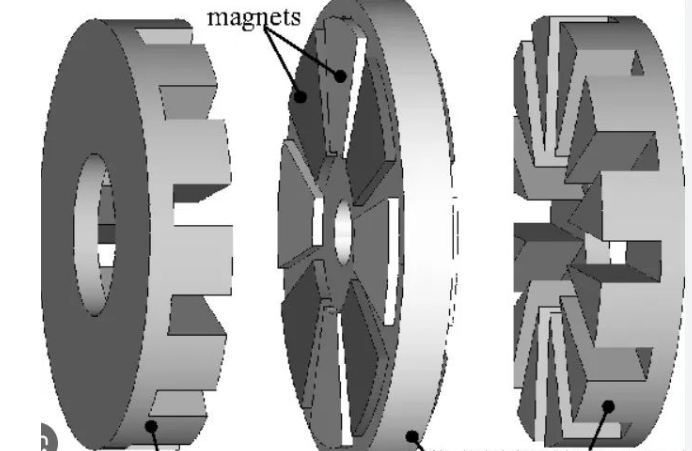
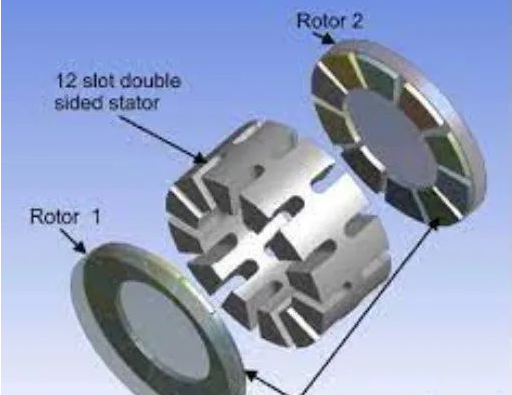
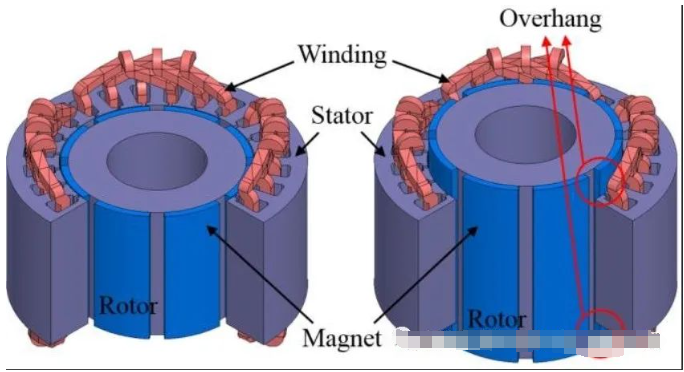
Il existe deux topologies principales pourmoteurs à flux axial: machines à double rotor et simple stator (parfois appelées machines de type tore) et machines à simple rotor et double stator.
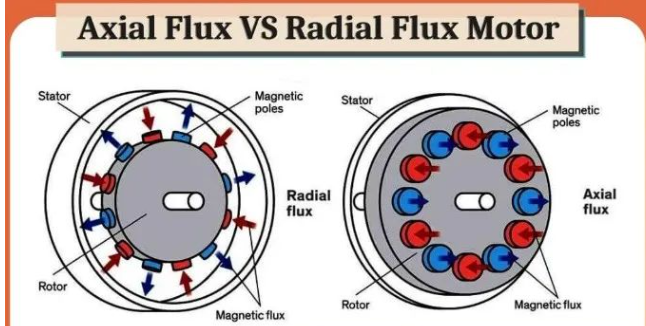
Actuellement, la plupart des moteurs à aimants permanents utilisent une topologie à flux radial. Le circuit de flux magnétique part d'un aimant permanent situé sur le rotor, traverse la première dent du stator, puis circule radialement le long de celui-ci. Il traverse ensuite la deuxième dent pour atteindre le deuxième aimant permanent du rotor. Dans une topologie à flux axial à double rotor, la boucle de flux part du premier aimant, traverse axialement les dents du stator et atteint immédiatement le deuxième aimant permanent.
Cela signifie que le trajet du flux est beaucoup plus court que celui des moteurs à flux radial, ce qui se traduit par des volumes de moteur plus petits, une densité de puissance plus élevée et un meilleur rendement à puissance égale.
Dans un moteur radial, le flux magnétique traverse la première dent puis revient à la dent suivante par le stator, pour atteindre l'aimant. Le flux magnétique suit un parcours bidimensionnel.
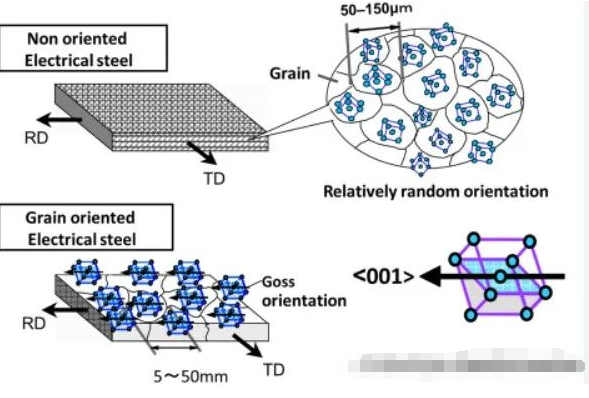
Le trajet du flux magnétique d'une machine à flux magnétique axial étant unidimensionnel, on peut utiliser de l'acier électrique à grains orientés. Cet acier facilite le passage du flux, améliorant ainsi le rendement.
Les moteurs à flux radial utilisent traditionnellement des enroulements répartis, dont jusqu'à la moitié des extrémités ne sont pas fonctionnelles. Le débordement de la bobine entraîne un surpoids, un surcoût, une résistance électrique accrue et des pertes de chaleur plus importantes, obligeant les concepteurs à optimiser la conception des enroulements.
Les extrémités de la bobinemoteurs à flux axialLes pertes sont bien moindres, et certains modèles utilisent des enroulements concentrés ou segmentés, parfaitement efficaces. Pour les moteurs radiaux à stator segmenté, la rupture du circuit magnétique dans le stator peut engendrer des pertes supplémentaires, contrairement aux moteurs à flux axial où ce problème ne se pose pas. La conception de l'enroulement est un élément clé pour distinguer les fournisseurs.
3. Développement
Les moteurs à flux axial présentent des défis importants en matière de conception et de production. Malgré leurs avantages technologiques, leur coût est bien supérieur à celui des moteurs radiaux. Ces derniers bénéficient d'une excellente maîtrise technique, et leurs méthodes de fabrication ainsi que leurs équipements mécaniques sont facilement disponibles.
L'un des principaux défis des moteurs à flux axial est de maintenir un entrefer uniforme entre le rotor et le stator, car la force magnétique y est bien supérieure à celle des moteurs radiaux, ce qui rend difficile le maintien d'un entrefer uniforme. Le moteur à flux axial à double rotor présente également des problèmes de dissipation thermique, car l'enroulement est situé profondément à l'intérieur du stator et entre les deux disques du rotor, ce qui rend la dissipation de la chaleur très difficile.
Les moteurs à flux axial sont également difficiles à fabriquer pour de nombreuses raisons. La machine à double rotor utilisant une topologie à culasses (c'est-à-dire en supprimant la culasse en fer du stator tout en conservant les dents en fer) résout certains de ces problèmes sans augmenter le diamètre du moteur ni celui de l'aimant.
Cependant, la suppression de la chape pose de nouveaux défis, notamment celui de fixer et de positionner les dents individuellement sans liaison mécanique. Le refroidissement représente également un défi majeur.
La fabrication du rotor et le maintien de l'entrefer sont également complexes, car le disque du rotor attire le stator. L'avantage réside dans la liaison directe des disques du rotor par une bague d'arbre, ce qui annule les forces en jeu. Ainsi, le palier interne ne supporte pas ces forces et son rôle se limite à maintenir le stator en position centrale entre les deux disques du rotor.
Les moteurs à double stator et rotor unique ne présentent pas les mêmes difficultés que les moteurs circulaires, mais la conception du stator est beaucoup plus complexe et difficile à automatiser, ce qui engendre des coûts élevés. Contrairement aux moteurs à flux radial traditionnels, les procédés de fabrication et les équipements mécaniques des moteurs axiaux sont d'apparition récente.
4. Application des véhicules électriques
La fiabilité est cruciale dans l'industrie automobile, et prouver la fiabilité et la robustesse des différents systèmes est essentiel.moteurs à flux axialConvaincre les fabricants que ces moteurs conviennent à la production de masse a toujours été un défi. C'est pourquoi les fournisseurs de moteurs axiaux ont entrepris de vastes programmes de validation, chacun démontrant que la fiabilité de son moteur est équivalente à celle des moteurs à flux radial traditionnels.
Le seul composant qui peut s'user dans unmoteur à flux axialCe sont les paliers qui posent problème. La longueur du flux magnétique axial étant relativement courte et les paliers plus rapprochés, ils sont généralement légèrement surdimensionnés. Heureusement, le moteur à flux axial possède un rotor de masse réduite et supporte des charges dynamiques sur l'arbre rotorique plus faibles. Par conséquent, la force réelle appliquée aux paliers est bien inférieure à celle d'un moteur à flux radial.

L'essieu électronique est l'une des premières applications des moteurs axiaux. Sa faible largeur permet d'intégrer le moteur et le réducteur dans l'essieu. Dans les applications hybrides, la longueur axiale réduite du moteur diminue la longueur totale du système de transmission.
L'étape suivante consiste à installer le moteur axial sur la roue. Ainsi, la puissance est directement transmise du moteur aux roues, ce qui améliore son rendement. L'élimination des transmissions, des différentiels et des arbres de transmission permet également de réduire la complexité du système.
Cependant, il semble qu'aucune configuration standard n'ait encore émergé. Chaque constructeur automobile étudie des configurations spécifiques, car les différentes tailles et formes de moteurs axiaux peuvent modifier la conception des véhicules électriques. Comparés aux moteurs radiaux, les moteurs axiaux présentent une densité de puissance supérieure, ce qui permet d'utiliser des moteurs axiaux plus petits. Ceci ouvre de nouvelles perspectives de conception pour les plateformes de véhicules, notamment en ce qui concerne l'emplacement des batteries.
4.1 Armature segmentée
La topologie de moteur YASA (sans culasse et à armature segmentée) est un exemple de topologie à double rotor et stator unique, qui simplifie la fabrication et se prête à la production de masse automatisée. Ces moteurs présentent une densité de puissance allant jusqu'à 10 kW/kg à des vitesses de 2 000 à 9 000 tr/min.

Grâce à un contrôleur dédié, il peut fournir un courant de 200 kVA au moteur. Ce contrôleur, d'un volume d'environ 5 litres et d'un poids de 5,8 kilogrammes, intègre un système de gestion thermique par refroidissement à huile diélectrique et convient aux moteurs à flux axial, à induction et à flux radial.
Cela permet aux constructeurs de véhicules électriques et aux développeurs de premier plan de choisir avec souplesse le moteur le plus adapté à l'application et à l'espace disponible. La taille et le poids réduits allègent le véhicule et permettent d'intégrer davantage de batteries, augmentant ainsi son autonomie.
5. Application des motos électriques
Pour les motos et quads électriques, certaines entreprises ont développé des moteurs à flux axial à courant alternatif. Le modèle couramment utilisé pour ce type de véhicule est un moteur à flux axial à courant continu avec balais, tandis que le nouveau produit est un moteur à courant alternatif sans balais, entièrement étanche.
Les bobines des moteurs à courant continu et à courant alternatif restent fixes, mais les moteurs à double rotor utilisent des aimants permanents au lieu d'armatures rotatives. L'avantage de cette méthode est qu'elle ne nécessite pas d'inversion mécanique du sens de rotation.
La conception axiale à courant alternatif peut également utiliser des contrôleurs de moteurs triphasés standard pour moteurs radiaux. Cela permet de réduire les coûts, car le contrôleur agit sur le couple et non sur la vitesse. Ce contrôleur requiert une fréquence de 12 kHz ou plus, fréquence courante pour ce type d'appareils.
La fréquence plus élevée est due à la faible inductance de l'enroulement (20 µH). Elle permet de contrôler le courant afin de minimiser son ondulation et d'assurer un signal sinusoïdal aussi régulier que possible. D'un point de vue dynamique, c'est un excellent moyen d'obtenir une commande moteur plus fluide en autorisant des variations de couple rapides.
Cette conception utilise un enroulement à double couche distribué, de sorte que le flux magnétique circule du rotor à l'autre rotor à travers le stator, avec un trajet très court et un rendement plus élevé.
Ce dispositif se caractérise par un fonctionnement à une tension maximale de 60 V et n'est pas adapté aux systèmes à tension plus élevée. Il peut donc être utilisé pour les motos électriques et les véhicules à quatre roues de classe L7e, comme la Renault Twizy.
La tension maximale de 60 V permet d'intégrer le moteur aux systèmes électriques 48 V courants et simplifie les travaux de maintenance.
Le règlement-cadre européen 2002/24/CE stipule que le poids des véhicules utilisés pour le transport de marchandises ne doit pas excéder 600 kg, hors batteries. Ces véhicules sont autorisés à transporter au maximum 200 kg de passagers, 1 000 kg de chargement et à développer une puissance moteur maximale de 15 kW. Le bobinage réparti permet d'obtenir un couple de 75 à 100 Nm, une puissance de pointe de 20 à 25 kW et une puissance continue de 15 kW.
Le défi posé par le flux axial réside dans la dissipation de la chaleur par les enroulements en cuivre, une tâche complexe car la chaleur doit traverser le rotor. L'enroulement distribué, grâce à ses nombreuses encoches polaires, constitue la solution à ce problème. Ainsi, la surface d'échange thermique entre le cuivre et l'enveloppe est plus importante, permettant un transfert de chaleur vers l'extérieur et son évacuation par un système de refroidissement liquide standard.
La présence de plusieurs pôles magnétiques est essentielle pour exploiter les formes d'onde sinusoïdales, ce qui contribue à réduire les harmoniques. Ces harmoniques se manifestent par un échauffement des aimants et du noyau, or les composants en cuivre ne peuvent dissiper la chaleur. Lorsque la chaleur s'accumule dans les aimants et les noyaux de fer, le rendement diminue ; c'est pourquoi l'optimisation de la forme d'onde et du chemin de dissipation thermique est cruciale pour les performances du moteur.
La conception du moteur a été optimisée afin de réduire les coûts et de permettre une production en série automatisée. L'anneau de boîtier extrudé ne nécessite pas d'usinage complexe et permet de réduire les coûts des matériaux. La bobine peut être bobinée directement et un procédé de collage est utilisé lors du bobinage pour garantir la forme correcte de l'ensemble.
L'élément clé est que la bobine est fabriquée à partir de fil standard disponible dans le commerce, tandis que le noyau de fer est constitué de tôles d'acier pour transformateur standard, disponibles dans le commerce, qu'il suffit de découper à la forme voulue. D'autres conceptions de moteurs nécessitent l'utilisation de matériaux magnétiques doux pour la fabrication du noyau, ce qui peut s'avérer plus coûteux.
L'utilisation d'enroulements répartis permet de s'affranchir du découpage de l'acier magnétique ; celui-ci peut adopter des formes plus simples et faciliter sa fabrication. La réduction de la taille de l'acier magnétique et la simplification de sa production contribuent significativement à la réduction des coûts.
La conception de ce moteur à flux axial peut être personnalisée selon les besoins du client. Des versions sur mesure, développées à partir d'une conception de base, sont ensuite fabriquées sur une ligne de production pilote pour une validation préliminaire, permettant ainsi leur reproduction dans d'autres usines.
La personnalisation est principalement due au fait que les performances du véhicule dépendent non seulement de la conception du moteur à flux magnétique axial, mais aussi de la qualité de la structure du véhicule, de la batterie et du BMS.
Date de publication : 28 septembre 2023


